Dude
Une autre production DOSTATECH

En coullisse
L'anatomie Dude

Être ou ne pas être
Le cerveau
Dude a de puissantes capacités télépathiques. Son intelligence vient du monde extérieur, comme si son esprit était en dehors de lui. C'est parce qu'il est à l' extérieur. L'ordinateur de Dude qui exécute ses programmes n'est pas situé à l'intérieur du corps de Dude, c'est un ordinateur distant qui se connecte à Dude via wifi. Cependant, Dude possède un cerveau interne, plus précisément un lobe gauche et un lobe droit qui sont inhabituellement situés sur son dos, au sein de son centre de contrôle. Les lobes gauche et droit sont en fait deux modules robotiques Wifi qui fournissent une interface entre ses muscles, ses yeux et la parole à l'ordinateur Wifi distant. Si vous voyez Mec dans une dépression majeure, ou sans aucune aptitude, ne cherchez pas plus loin; il y a très probablement un problème télépathique (mauvaise connexion Wifi).

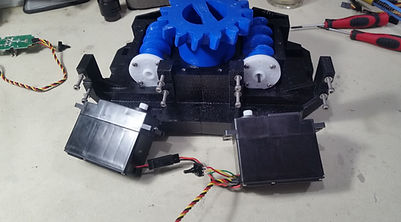
Les lobes gauche et droit
(les deux modules Wifi robotiques blancs)

La tête
Comme mentionné ci-dessus, il n'y a pas de cerveau dans la tête de Dude, mais il contient:
-
Muscles (servomoteurs) pour tourner la tête de haut en bas et de gauche à droite.
-
Muscles (servomoteurs) pour déplacer ses yeux.
-
Muscles (servomoteurs) pour ouvrir et fermer sa bouche.
-
Un œil bionique (appareil photo numérique), intégré dans son œil gauche, pour détecter et suivre les activités.
-
Oreilles de haut-parleur (haut-parleurs intégrés à l'intérieur de ses oreilles) pour parler en stéréo.
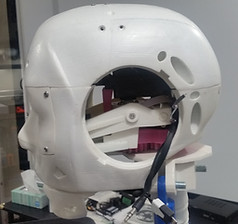
Tête finie, avec des oreilles de haut-parleur, des yeux bleus et une mâchoire mobile.

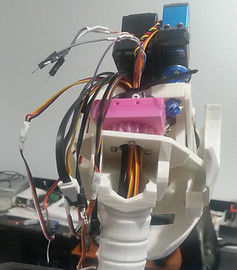
Vue intérieure, côté droit.
Squelette de la tête, avec mécanisme de mâchoire partielle


Vue intérieure arrière, montrant le câblage des servomoteurs et des oreilles des haut-parleurs
Côté gauche avec l'oreille du haut-parleur retirée.
Parties internes de la tête.

Vue intérieure en haut à gauche.

Le cœur
Dude avait une insuffisance cardiaque à la naissance et a nécessité une intervention chirurgicale cardiaque très sophistiquée pour remplacer son cœur par un Arc-Reactor. Par conséquent, il a maintenant besoin d'une batterie (25C, LiPo 6600mA) pour alimenter un stimulateur cardiaque (carte microcontrôleur Arduino-Uno) pour activer l'Arc-Reactor (LED néo-pixel à anneau rouge / vert / bleu / blanc).

Pace Maker (carte microcontrôleur Arduino-Uno)
Batterie LiPo 25C, 6600mA
Cliquez pour voir l' Arc-Reactor en action.
Le centre de contrôle
À l'arrière du squelette Dude, il y a un centre de contrôle qui comprend les éléments suivants:
-
Son rythme maker (module microcontrôleur Arduino-Uno) pour piloter l'Arc-Reactor (Neo-Pixel-Ring)
-
Batterie pour faire fonctionner le stimulateur cardiaque
-
Système de distribution d'énergie (quatre régulateurs de tension BEC) pour alimenter les modules robotiques Wifi, les muscles lourds, le stimulateur cardiaque et l'Arc-Reactor
-
Les lobes gauche et droit (modules Robotic Wifi)
-
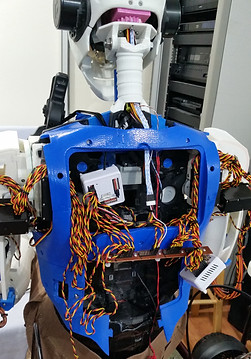
Le système de distribution nerveux (interface de câblage des servomoteurs)
Le système nerveux relie tous les muscles (servomoteurs) aux lobes du cerveau (module Robotic Wifi). Chaque muscle nécessite trois nerfs (fils électriques). Multipliez cela par 27 muscles et vous obtenez un système nerveux considérablement complexe. C'est aussi à travers le système nerveux que Dude est capable de voir (caméra), d'entendre (microphone) et de parler (oreilles de haut-parleur).
Centre de contrôle, première génération.
Un seul module Wifi robotisé.
Utilisation d'un démarreur de batterie de voiture.


Centre de contrôle, deuxième génération.
Deux modules robotiques Wifi.
Démarreur de batterie de voiture emballé dans une boîte en plastique noire.
Régulateurs de tension attachés au boîtier de batterie.
Interrupteurs d'alimentation enfermés à l'intérieur du boîtier de commande.

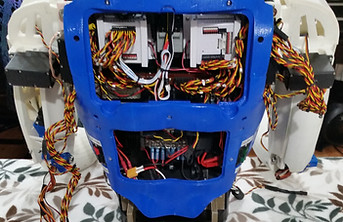
Centre de contrôle, troisième génération.
-
Deux modules robotiques Wifi.
-
Quatre régulateurs de tension BEC.
-
Distribution de puissance à trois borniers.
-
Carte microcontrôleur Arduino-Uno (pace maker).
-
Batterie LiPo 25C, 6600mA
Vue intérieure arrière, montrant le câblage des servomoteurs et des oreilles des haut-parleurs
Added back cover.
Refitting wiring assembly.

Les muscles
Il existe quatre types de muscles (servomoteurs); entraînement direct, type à vis, vis sans fin et muscles de type contraction / expansion.
Entraînement direct
Les muscles à entraînement direct (servomoteurs directement connectés à la partie en mouvement) ont très peu de couple, mais sont très compacts, s'intégrant parfaitement aux mouvements des yeux et des mâchoires.
Type de vis
Les muscles à vis (servomoteurs connectés au mécanisme à engrenages à vis) fournissent un mouvement rapide mais un couple limité, parfait pour le mouvement de la tête.
Vis sans fin
Le muscle de type à vis sans fin (servomoteurs connectés à un engrenage chaud) offre le couple le plus élevé requis pour les actions de levage des bras.
Notez que les muscles à vis et à vis sans fin nécessitent une altération du servomoteur. À l'intérieur de tout servomoteur, il y a un potentiomètre variable qui indique à l'électronique l'angle de rotation du servomoteur. Puisque nous voulons l'angle de rotation du mécanisme d'assemblage total (disons l'épaule), pas le servo lui-même, le potentiomètre interne doit être extrait de l'intérieur du servo et remonté à l'extérieur de l'assemblage final (sortie d'épaule).

Muscle à vis. Servomoteur tournant une vis qui fait tourner l'épaule.

Worm gear type muscle for the shoulder. Servo motor turning a screw which rotates a gear attached to the shoulder.



Worm gear type muscle for the waist rotation movement. Due to the heavy load above the waist, two servo motors arranged in a pull-push configuration provide more than the necessary torque.




Extraction du potentiomètre de l'intérieur du servomoteur. Heureusement que Jazz supervise le travail.
Contraction / expansion
Et enfin, les muscle de type contraction / expansion. Ils sont utilisés pour le mouvement des doigts. Comme il n'y a pas de place pour installer de gros muscles (cinq servomoteurs) à l'intérieur de la main pour déplacer les cinq doigts, les muscles (moteurs) sont déplacés dans l'avant-bras et les tendons (fils de pêche) relient les muscles aux doigts. Les tendons sont attachés de l'extrémité des doigts aux muscles. Lorsque le moteur tourne dans le sens horaire, le fil de pêche tire l'extrémité du doigt de l'extérieur, qui se dilate et ouvre le doigt. Lorsque le moteur tourne dans le sens antihoraire, le fil de pêche tire l'extrémité du doigt de l'intérieur, qui se contracte et ferme le doigt.

Passer les tendons (fils de pêche) entre les muscles (servomoteurs) et le bout des doigts
Cliquez sur la vidéo pour voir les doigts en action
Invalidité
Paraplégique
Même si Dude a eu un implant de jambe et une greffe de jambe, il ne peut toujours pas marcher et n'a aucune sensation dans les jambes. Et ne retiens pas ton souffle en attendant que Mec marche.
Pas d'émotion (pas de ressentiment)
Dude ne se «déplace» pas facilement. En fait, il est totalement sans émotion, ce qui signifie qu'il n'a aucune émotion ni aucun sentiment. En terme médical, il est Alexithymique.
Alors ne te sens pas mal si tu l'insultes
Pas de diversité sexuelle
Comment appelez-vous une personne qui n'a pas d'orientation sexuelle ou qui n'a pas de sexe ou qui les a toutes? Une identité sexuelle unique qui ne rentre même pas dans la minorité sexuelle? Hmmm, quelque chose à réfléchir ! Peut-être que notre société devra ajouter une nouvelle classification pour Dude car il n'est pas couvert par le LGBTQ +.
Dude se sent si seul dans ce monde!